|
|
|
HAL
v0.6.1
Hardware Abstraction Layer
|
|
|
|
HAL
v0.6.1
Hardware Abstraction Layer
|
General Purposes Input & Output. More...
Typedefs | |
| typedef uint16_t | gpio_pin_t |
| typedef void(* | hal_gpio_callback) (const gpio_pin_t pin) |
| GPIO external interrupt callback function prototype. | |
Functions | |
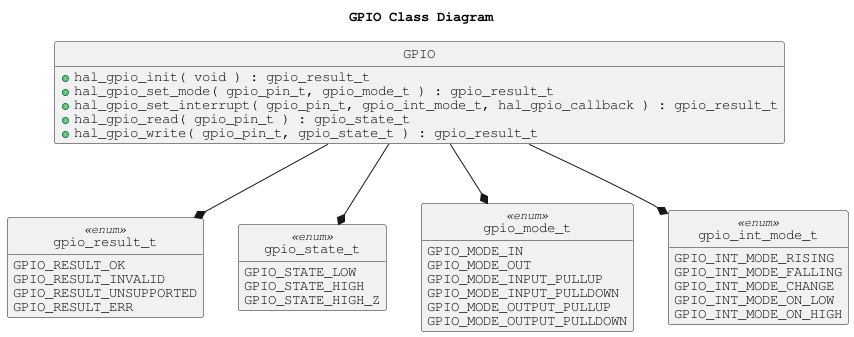
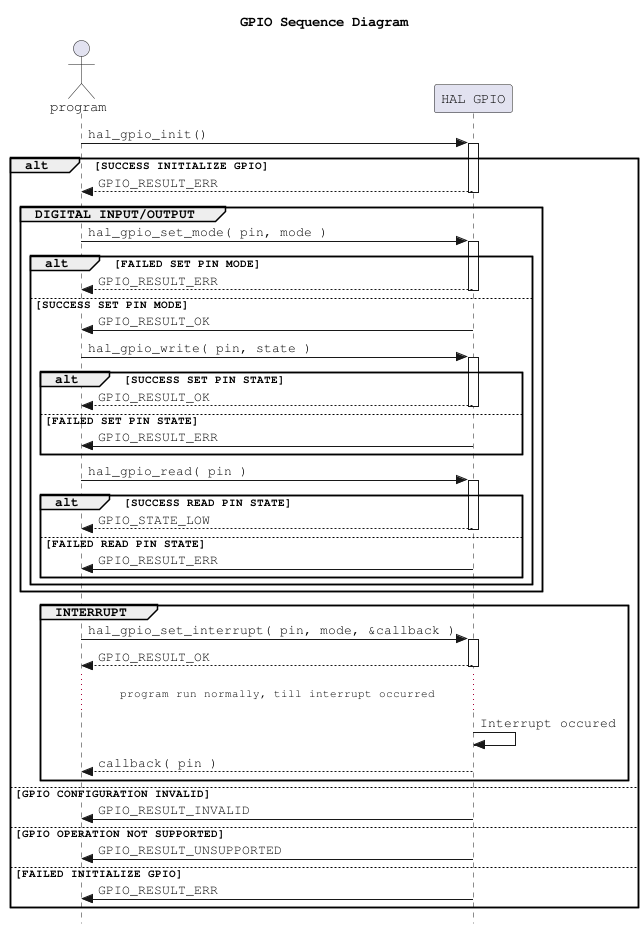
| gpio_result_t | hal_gpio_init (void) |
| Initialize GPIO as a whole. | |
| gpio_result_t | hal_gpio_set_mode (const gpio_pin_t pin, const gpio_mode_t mode) |
| Initialize pin mode. | |
| gpio_result_t | hal_gpio_set_interrupt (const gpio_pin_t pin, const gpio_int_mode_t mode, const hal_gpio_callback callback) |
| Attach interrupt to pin. | |
| gpio_state_t | hal_gpio_read (const gpio_pin_t pin) |
| Read digital pin state. | |
| gpio_result_t | hal_gpio_write (const gpio_pin_t pin, const gpio_state_t state) |
| Set digital pin state. | |
General Purposes Input & Output.
| typedef uint16_t gpio_pin_t |
#include <gpio/public_inc/hal_gpio.h>
| typedef void(* hal_gpio_callback) (const gpio_pin_t pin) |
#include <gpio/public_inc/hal_gpio.h>
GPIO external interrupt callback function prototype.
| [in] | pin | Interrupt pin |
| enum gpio_int_mode_t |
#include <gpio/public_inc/hal_gpio.h>
| enum gpio_mode_t |
#include <gpio/public_inc/hal_gpio.h>
| Enumerator | |
|---|---|
| GPIO_MODE_IN | |
| GPIO_MODE_OUT | |
| GPIO_MODE_INPUT_PULLUP | |
| GPIO_MODE_INPUT_PULLDOWN | |
| GPIO_MODE_OUTPUT_PULLUP | |
| GPIO_MODE_OUTPUT_PULLDOWN | |
| GPIO_MODE_OUTPUT_OPEN_DRAIN | |
| TOTAL_GPIO_MODE | |
| enum gpio_result_t |
#include <gpio/public_inc/hal_gpio.h>
| Enumerator | |
|---|---|
| GPIO_RESULT_OK | No error. |
| GPIO_RESULT_INVALID | Operation invalid. |
| GPIO_RESULT_UNSUPPORTED | Operation not supported. |
| GPIO_RESULT_ERR | Error occurred. |
| TOTAL_GPIO_RESULT | |
| enum gpio_state_t |
#include <gpio/public_inc/hal_gpio.h>
| Enumerator | |
|---|---|
| GPIO_STATE_LOW | |
| GPIO_STATE_HIGH | |
| GPIO_STATE_HIGH_Z | |
| TOTAL_GPIO_STATE | |
| gpio_result_t hal_gpio_init | ( | void | ) |
#include <gpio/public_inc/hal_gpio.h>
Initialize GPIO as a whole.
| GPIO_RESULT_OK | Success initialize GPIO |
| GPIO_RESULT_INVALID | Configuration attributes invalid |
| GPIO_RESULT_UNSUPPORTED | Operation not supported |
| GPIO_RESULT_ERR | Failed initialize GPIO |
| gpio_state_t hal_gpio_read | ( | const gpio_pin_t | pin | ) |
#include <gpio/public_inc/hal_gpio.h>
Read digital pin state.
| [in] | pin | Pin number |
| gpio_result_t hal_gpio_set_interrupt | ( | const gpio_pin_t | pin, |
| const gpio_int_mode_t | mode, | ||
| const hal_gpio_callback | callback ) |
#include <gpio/public_inc/hal_gpio.h>
Attach interrupt to pin.
| [in] | pin | Pin number |
| [in] | mode | Interrupt mode |
| [in] | callback | Interrupt handler will return interrupt pin matched |
| GPIO_RESULT_OK | Success attach interrupt to a pin |
| GPIO_RESULT_INVALID | Invalid interrupt pin or selected mode |
| GPIO_RESULT_ERR | Failed attach interrupt to a pin |
| gpio_result_t hal_gpio_set_mode | ( | const gpio_pin_t | pin, |
| const gpio_mode_t | mode ) |
#include <gpio/public_inc/hal_gpio.h>
Initialize pin mode.
| [in] | pin | Pin number |
| [in] | mode | Pin mode |
| GPIO_RESULT_OK | Success initialize pin mode |
| GPIO_RESULT_ERR | Failed initialize pin mode |
| gpio_result_t hal_gpio_write | ( | const gpio_pin_t | pin, |
| const gpio_state_t | state ) |
#include <gpio/public_inc/hal_gpio.h>
Set digital pin state.
| [in] | pin | Pin number |
| [in] | state | Desired pin state |
| GPIO_RESULT_OK | Success set digital pin state |
| GPIO_RESULT_ERR | Failed set digital pin state |